
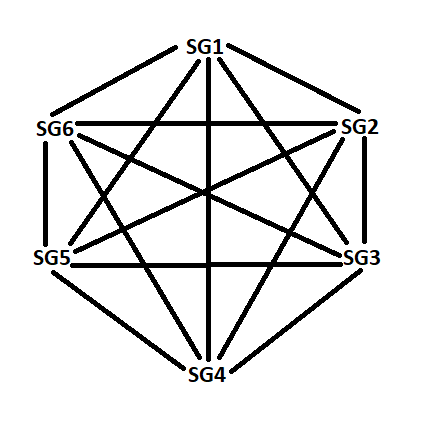
Damals
Jedes Steuergerät war mit jedem Steuergerät mit dem es kommunizieren musste direkt verbunden. Dies führte im worst case zu einem vollständig vermaschten Netz. Bei diesem Ansatz wurden unnötig große Mengen an Kabeln verbaut.
Heute
Zur Reduzierung der Kabelmengen werden sogenannte Feldbusse verwenden, auch wenn diese nicht immer in einer Bus-Topologie realisiert sind. Bei diesen werden unterschiedliche Kommunikationen über die selben Kabel geführt. In modernen Fahrzeugen werden übrigens verschiedene dieser verbaut.
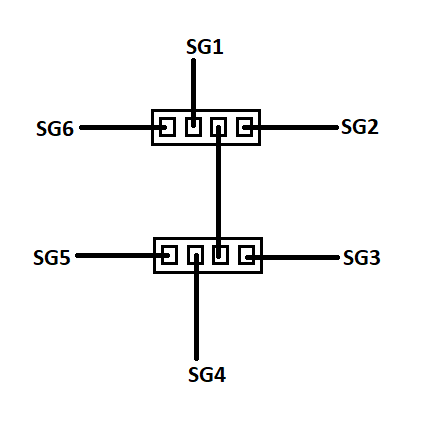
CAN
CAN ist in einer Bus-Topologie aufgebaut. Es wurde von Bosch entwickelt.
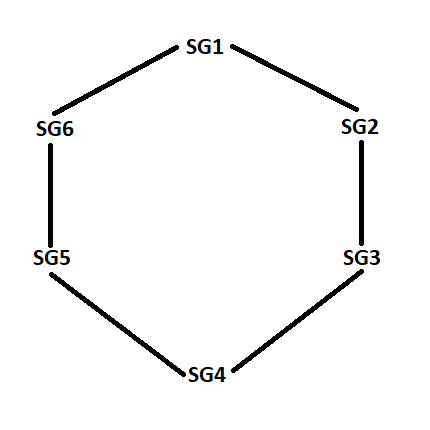
MOST
MOST wird normalerweise in einer Ring-Topologie realisiert.
Ethernet
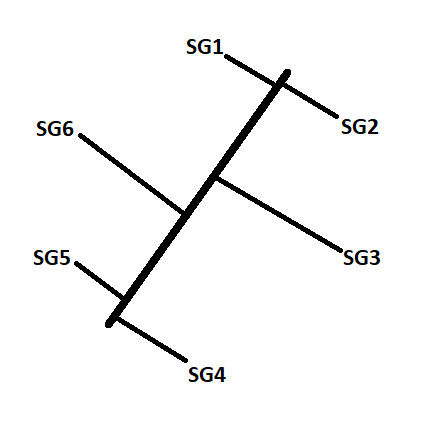
Ethernet ermöglicht erweiterte Stern-Topologien durch Switches.
Weitere Feldbusse sind zum Beispiel: LIN und FlexRay.